Fundamentals for Robotic Platforms in Connected Active Space (CAS)
- AIR
- May 21, 2020
- 1 min read

프로젝트명(국문) : 연결 동적 공간 구현 기술을 위한 로봇 기반 기술 개발
프로젝트명(영문) : Fundamentals for Robotic Platforms in Connected Active Space (CAS)
Topics : Intelligent Space, Mobile Robots, Service Robots, Manipulation, Human-Robot Interaction
참여 연구원 : 최종석, 오용환, 김도익, 김준식, 차영수, 박정민, 박명수, 박재영, 황동현, 임세혁, 인용석, 양성욱, 김강건, 곽소나, 이종원(, 송가혜, 이이수)
연구기간 : 2015.1.1~ Present
Contact : Dr. Jong-Suk Choi ( cjs@kist.re.kr ) and Dr. Jun-Sik Kim ( junsik.kim@kist.re.kr )
Description
A CAS (Connected Active Space) is a future space in which users are supported by various IoT and robotic technologies. Those are connected to each other and provide intelligent and physical support to the users. In this project, we present the prototypes of the connected services in usual life which will be available in a near future.
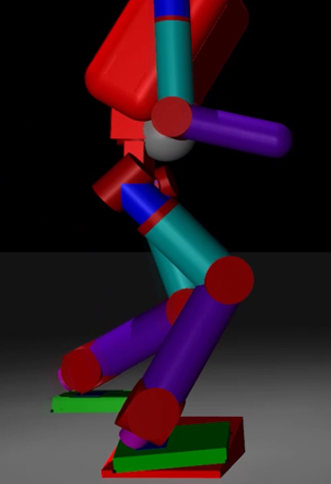
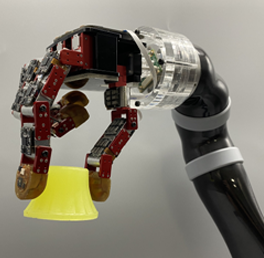
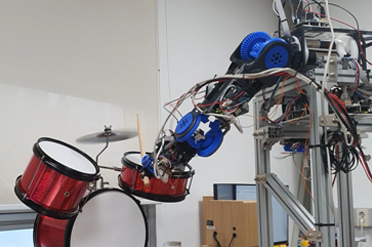
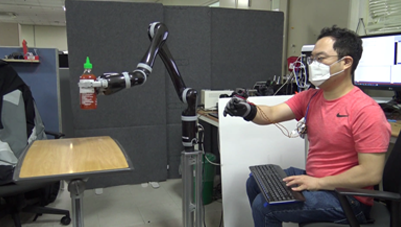
We are developing fundamental technology for sensors and mobile robots supporting users directly and physically. It includes development of mobile service robots, an arm-hand architecture which can handle objects in various shapes and physical properties, an upper body structure which can move dexterously, a whole body control for a humanoid to walk stable on unknown terrains, a haptic interface that a user can perceive the tactile sensing which would be sensed by a remote robot, mapping and localization methods with vision and other sensors, a sensor network system which can be localized to each other without any anchor, and more. We keep searching for research directions to make future life supported by many robots and robotic technologies.








Comments